Case 1.2: KVLCC2 Deep water, trajectories
CASE 1.2
1. Description of case 1.2
- KVLCC2 hull shape, at even keel draught of 20.8 meter (full scale), model scale draught 0.455m.
- LPP = 7.000 m (scale 45.714)
- No bilge keels.
- Free to move in all directions.
- Starting speed: Fn = 0.142 (corresponding to full scale 15.5 knots or model scale 1.18 m/s).
- Calm water
- g = 9.81 [m/s2], ρ=1000 [kg/m3]; ν=1.27×10-6 [m2/s]
- Propeller present and working at constant RPM. The RPM of the propeller is such that the ship is in (longitudinal) equilibrium at a speed of 15.5 knots full scale.
- Rudder (mariner type) steerable. The rudder rate will correspond to 2.32°/s on full scale or 15.68°/s on model scale
- GM is set to 5.71 meter (full scale), model scale value of 0.125). The roll angle during the manoeuvres will be negligible, so it may not be needed to model this.
- Water depth is deep water, Wd/T = 17.5
- Radius of gyration for yaw and pitch are 0.24LPP (in air)
- Radius of gyration for roll is 0.4B (in air)
Case 1.2 will consists of 2 cases: case 1.2.1 and 1.2.2, as explained below:
2. Experimental data
The submissions in case 1.2 will be compared to model tests carried out by MARIN as primary data, but data is also available carried out by HSVA and CTO.
3. Requested computations
2 manoeuvres are requested. You can only deliver case 1.2.3 when you deliver case 1.2.2.
Table 1: overview of cases.
| Package |
Manoeuvre |
Starting speed V0 |
| Case 1.2.1 |
Self propulsion information |
Fn = 0.142 (equivalent to 15.5 knots full scale) |
| Case 1.2.2 |
20°/20° zigzag test, starting to starboard |
Fn = 0.142 (equivalent to 15.5 knots full scale) |
| Case 1.2.3 |
35° turning circle test, starting to portside |
Fn = 0.142 (equivalent to 15.5 knots full scale) |
The propeller RPM at t=0 should be such that the ship is in longitudinal equilibrium. So, for a CFD time domain simulations, the situation at t=0 is equivalent to a propulsion test! The analysers will look at this data.
Note regarding the length of the simulation. We understand that for time-domain CFD simulations, the computation time can be long. For simulations based on mathematical models this is not the case. But in order to perform a proper data analysis, the time trace needs to be sufficiently long. For the 20/20° zigzag manoeuvre, at least including the second overshoot angle needs to be present (more when possible). For the 35° turning circle manoeuvre, at least a 360° turn has to be made
3.1 Submission 1.2.1: Self-propulsion
This submission is especially interesting for simulations based on URANS CFD. This case shows the “neutral rudder angle”, and the obtained longitudinal equilibrium (the propeller rpm and thrust). For simulations based on coefficient models, the neutral angle will often be zero.
- All results are to be given for model scale conditions.
- All simulations results should be provided in the format described in section 4.
- The propeller rate of revolution should correspond to the self-propulsion point of the model. When the RPM is unknown (because for example a constant thrust or actuator disk model is used in CFD based simulations) please indicate this.
- Similar to the experiment, the rudders should be controlled by following autopilot during course keeping:
 (2)
(2)
where δ(t) is rudder angle, proportional gain KP is 1.0, ψC is the target yaw angle and ψ(t) is yaw angle. The maximum rudder rate should be assigned to 15.68 [deg/s], model scale. Rudder angle should be controlled by P controller during approaching before starting rudder execution for maneuvering (Target yaw angle: ψC=0°)
Please see section 5 for an example of the submission.
3.2 Submission 1.2.2: 20°/20° starboard side zigzag maneuver
- All results are to be given for model scale conditions.
- All simulations results should be provided in the format described in section 4.
- The propeller rate of revolution should correspond to the self-propulsion point of the model. When the RPM is unknown (because for example a constant thrust or actuator disk model is used in CFD based simulations) please indicate this.
- Similar to the experiment, the rudders should be controlled by Equation (2) during approaching before starting rudder execution for starboard side zigzag.
- During the zigzag maneuver, the rudders should go to the real geometric 20 degrees (not to 20 degrees away from the neutral angle).
Please see section 6 for an example of the submission.
3.3 Submission 1.2.3: 35° portside turning circle maneuver
- All calculations are to be conducted for model scale conditions.
- All simulations results should be provided in the format described in section 4.
- The propeller rate of revolution should correspond to the self-propulsion point of the model. When the RPM is unknown (because for example a constant thrust or actuator disk model is used in CFD based simulations) please indicate this.
- Similar to the experiment, the rudders should be controlled by Equation (2) during approaching before starting rudder execution for starboard side zigzag.
- During the turning circle maneuver, the rudders should go to the real geometric 35 degrees (not 35 degrees away from the neutral angle).
Please see section 7 for an example of the submission.
4. Format
Time series of the manoeuvres should be send to the organizers in an excel file. The data shall be give on model scale, and it will be compared to model scale data.
- Time [s]
- The x-position: position of reference point of the ship, in meters, forward positive, measured from the position where t=0, the moment when the time the rudder is laid to its first value.
- The y-position, position of the reference point of the ship, in meters, positive to starboard.
- Roll angle (in degrees, positive when starboard is deeper in the water)
- Heading angle (in degrees, positive when the bow of the ship is pointing to starboard)
- u velocity [m/s] (ship fixed longitudinal velocity, forward positive)
- v velocity [m/s] (ship fixed transverse velocity, positive when drifting to starboard)
- p velocity [deg/s]
- r velocity [deg/s] (rotational velocity, positive when turning to starboard)
- Rudder angle [deg] (positive with trailing edge to portside)
- RPM of the propeller [rpm]
- Propeller thrust [N] (not obligated but possible and recommended for CFD submissions)
- Propeller torque [Nm] (not obligated but possible and recommended for CFD submissions). 5. The thrust T and torque Q for each propeller should be reported in shaft coordinate system with x axis positive toward the engine. Values are given dimensional
The following figure indicates the sign convention. The reference point is the origin, which is located at midships, the intersection of ordinate 10 the centre line plane and the still water waterline. The time t=0 is the time when the steering starts. The initial direction of the model is the direction of x0-axis. Initial conditions at t = 0 are: X
0=0, Y
0=0, ψ=0, ϕ=0, u=U
0, v=0, r=0, δ=0
 Figure 1: sign convention
Figure 1: sign convention
Explanation of the sign convention
There is a right-handed earth-fixed coordinate system x0y0z0 , and a horizontally moving right handed body-fixed coordinate system xyz. The body-fixed coordinate system has its origin in O, and the xy plane rotates with ship. The heading angle is defined as the angle between x0- and x-axis. u and v are the velocity components in x and y direction. the hull drift angle will be defined as β=atan(-v/u), and the total velocity U=√(u2+v2).
The ship position or trajectory should be given in an Earth-fixed coordinate system with x0 pointing North, y0 pointing East, and z0 pointing downward as shown in Figure 1. This axis system remains horizontal in the earth. The ship was released at (0, 0) when t = 0 . The roll angle (ϕ) is positive for pushing starboard into the water, pitch (θ) is positive for bow up position and yaw angle (ψ) is positive for bow turned to starboard. The reported trajectory is dimensional and angular motions should be reported in degrees. The angular velocities should be reported in degree per second. The reported starting yaw angle is zero. Rudder angle (δ) is positive when trailing edge moves to portside. The thrust T and torque Q for each propeller should be reported in shaft coordinate system with x axis positive toward the engine. Values are given dimensional
All velocities for 6DOF motions (u, v, p, r) should be reported in ship-fixed coordinate system with x axis positive toward bow, y axis positive toward starboard and z axis positive downward. This xyz axis system rotates with the ship in yaw but not pitch and roll, i.e., remains horizontal in the earth. It is a so-called “yawed-only reference system”. It is not needed to submit the velocities w and q, because the motions are small in the z-direction. Given this convention, the reported velocities are:
In Equation (4), the unit of p, r,

, and

is [deg/s].
- Link to an excel file case 1.2.1, in which the submitter can put his data.
- Link to an excel file case 1.2.2, in which the submitter can put his data.
- LLink to an excel file case 1.2.3, in which the submitter can put his data.
- Link to an excel file, in which the submitter can put the details of the calculation method.
The yellow fields in the excel sheet should be filled in. The excel sheet should be send to the organizing committee per email address “
simman2019host@gmail.com”.
Time series of the maneuvers should be send to the organizers in an excel file. The data shall be give on model scale, and it will be compared to model scale data.
The submission consists of an excel file (example is given) with 13 columns and with rows for every time step. The time step is free to chose, but a small enough time step somewhere around 0.05 to 0.01 is recommended to get sufficient accuracy. The following quantities are asked:
Table 2: Submission variables
| Symbol |
Item |
Unit |
| t |
time |
s |
| X |
X position in earth fixed system |
m |
| Y |
Y position in earth fixed system |
m |
| ϕ |
Roll angle |
degrees |
| ψ |
Yaw angle |
degree |
| u |
surge velocity in horizontal-body-fixed coordinate system |
m/s |
| v |
sway velocity in horizontal-body-fixed coordinate system |
m/s |
| p |
roll rate |
deg/s |
| r |
yaw rate in body-fixed coordinate system |
deg/s |
| δ |
Rudder angle |
deg |
| n |
Propeller revolutions |
rpm |
| T |
Thrust of propeller |
N |
| Q |
Torque of propeller |
Nm |
| FR |
Rudder normal force (except horn part) |
N |
These data are illustrated in Figure 1. The origin is located on O. The time t=0 is the time when the steering starts. The initial direction of the model is the direction of X-axis. Initial conditions at t = 0 are: X
0=0, Y
0=0, u=U
0, δ=δ
0 (which is the neutral rudder angle)
5. Elaborated example for case 1.2.1 (self propulsion information)
For case 1.2.1, we will ask the equilibrium speeds u, v, the rudder angle, RPM (i.e. the neutral rudder angle), thrust and torque, when available in the used method.
6. Elaborated example for case 1.2.2 (20/20 zigzag test)
For case 1.2.2, the comparison will look as displayed in the following figure. As can be seen, the results of the time traces will be post-processed and presented. Additionally to the figures, the values of overshoot angles, rates of turn, period, etc will be derived from the time series. These will be compared too as displayed in the below table for a submission compared to the FRMT data. A statistical analysis will be performed for all submissions to observe the spreading in results.
The primary values for the comparison will be the 1
st and 2
nd overshoot angles and the initial turning ability
The secondary values for the comparison will be the period, the rate of turn during 1
st and 2
nd oscillation.
Table 3: Comparison values for Case 1.2.2
| Category |
Unit |
Validation Variables |
| Overshoot angles |
[deg] |
1st overshoot angle (ψOS1) |
|
[deg] |
2nd overshoot angle (ψOS2) |
|
[deg] |
3nd overshoot angle (ψOS3) |
|
[s] |
Time of 2nd rudder execute (t2) |
|
[s] |
Time of 3rd rudder execute (t3) |
|
[s] |
Time of 4th rudder execute (t4) |
|
[s] |
Time of 5th rudder execute (t5) |
| Times |
[s] |
Period (time between the 4th and 2nd rudder execute = t4-t2) |
|
[s] |
1st overshoot time (tOS1) |
|
[s] |
2nd overshoot time (tOS2) |
|
[s] |
3rd overshoot time (tOS3) |
| Maximum yaw rate |
[deg/s] |
Maximum yaw rate during 1st overshoot between t2 and t3 (r1) |
|
[deg/s] |
Maximum yaw rate during 2nd overshoot between t3 and t4 (r2) |
|
[deg/s] |
Maximum yaw rate during 3rd overshoot between t4 and t5 (r3) |
| Maximum drift angle |
[deg] |
Maximum drift angle during 1st overshoot between t2 and t3 (β1) |
|
[deg] |
Maximum drift angle during 2nd overshoot between t3 and t4 (β2) |
|
[deg] |
Maximum drift angle during 3rd overshoot between t4 and t5 (β3) |
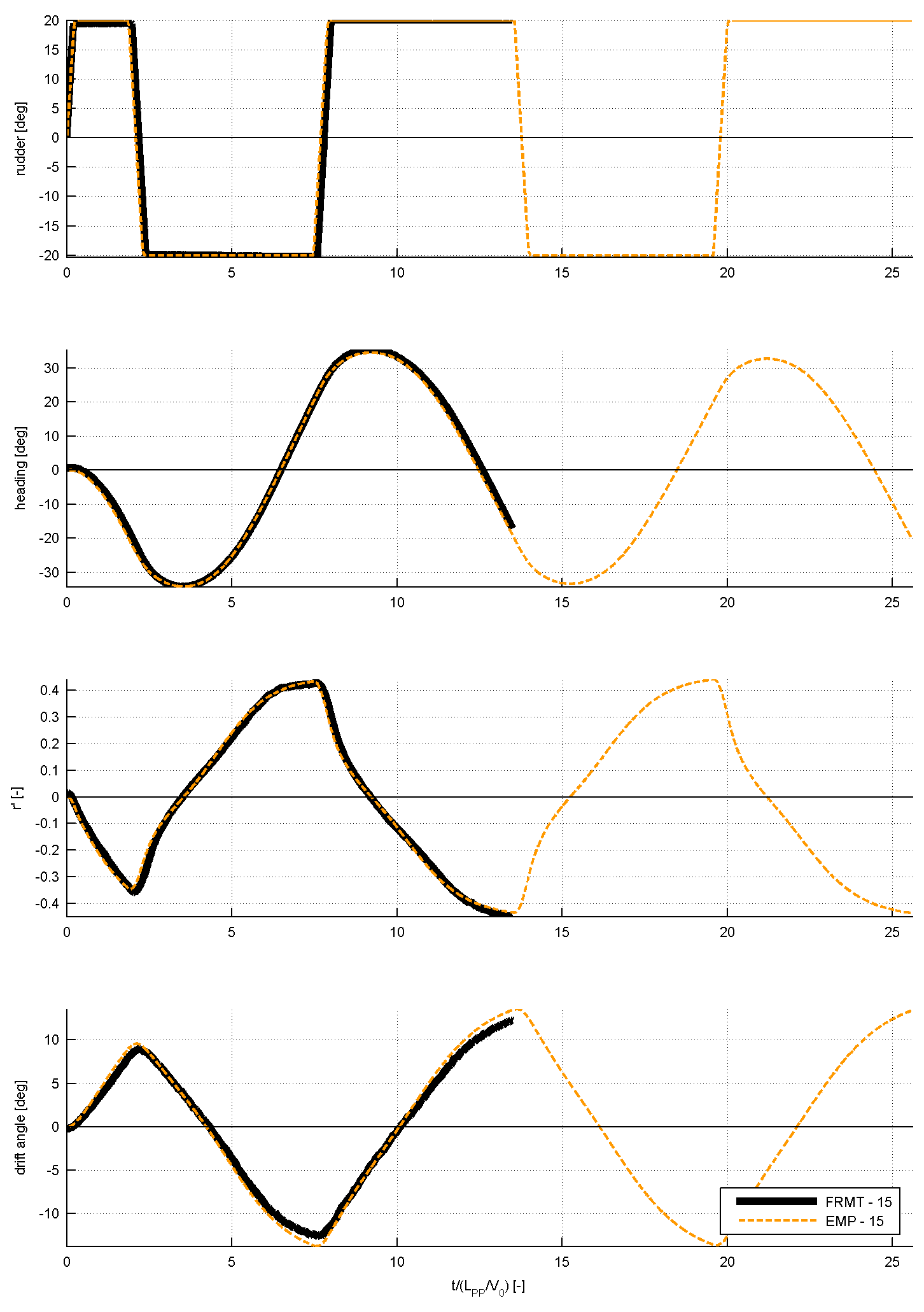 Figure 2: Comparison of time traces from the prediction method and the experiment
Figure 2: Comparison of time traces from the prediction method and the experiment
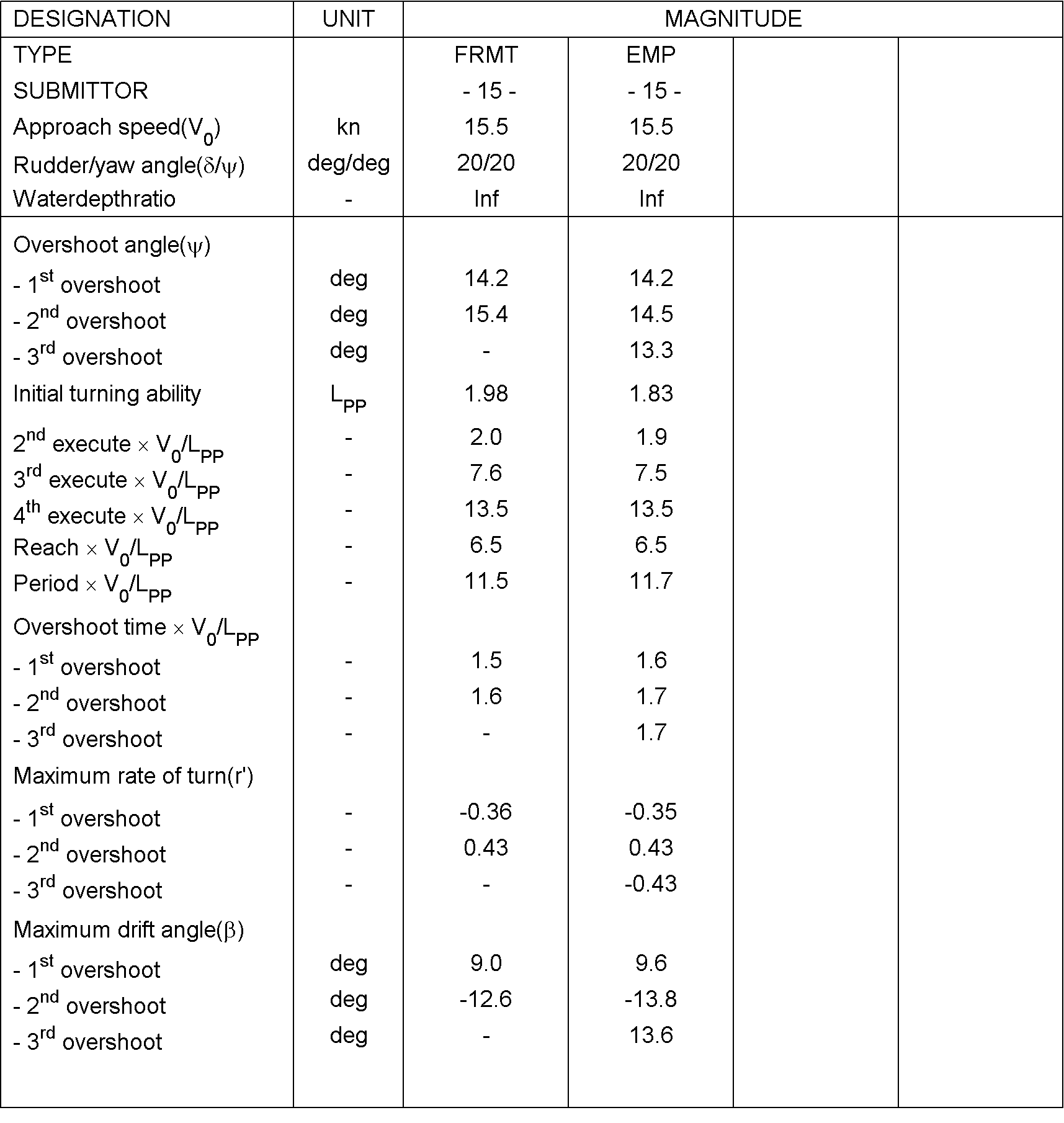
Table 4: Characteristics derived from the time series of the 20/20 zigzag test to starboard
7. Example for case 1.2.3: 35° turning circle maneuver to portside
For case 1.2.3, the comparison will look as displayed in the following 2 figures. As can be seen, the results of the time traces will be post-processed and presented. Additionally to the figures, the typical characteristics of tactical diameter, rate of turn, drift angle, speed loss, etc will be derived from the time series. These will be compared too as displayed in the below table 6 for 1 submission compared to the FRMT data. A statistical analysis will be performed for all submissions to observe the spreading in results.
The primary values for the comparison will be the advance and the tactical diameter. They are indicated in bold.
The secondary values for the comparison will be drift angle, rate of turn and speed loss during the constant part of the manoeuvre. They are indicated in not bold.
Table 5: Comparison values for the 35° turning circle maneuver
| Category |
Unit |
Validation Variables |
| Dimensions |
[-] |
Advance / LPP (Ad/LPP) |
|
[-] |
Tactical diameter / LPP (TD/LPP) |
|
[-] |
Transfer / LPP (Tr/LPP) |
| Times |
[s] |
Time to reach 180° (t180) |
| Yaw rate |
[deg/s] |
Maximum yaw rate (rmax) |
|
[deg/s] |
Average yaw rate in the constant part of the turn (rC) |
| Speed |
[m/s] |
Speed in the steady part of the turn (UC) |
| Non-dimensional values |
[-] |
Non-dimensional yaw rate in the constant part of the turn (r’) |
| u |
[deg] |
Drift angle in the constant part of the turn (βC) |
| v |
[-] |
Pivot point (-sin(βC)/r’) |
| p |
[-] |
Speed ratio (UC/U0) |
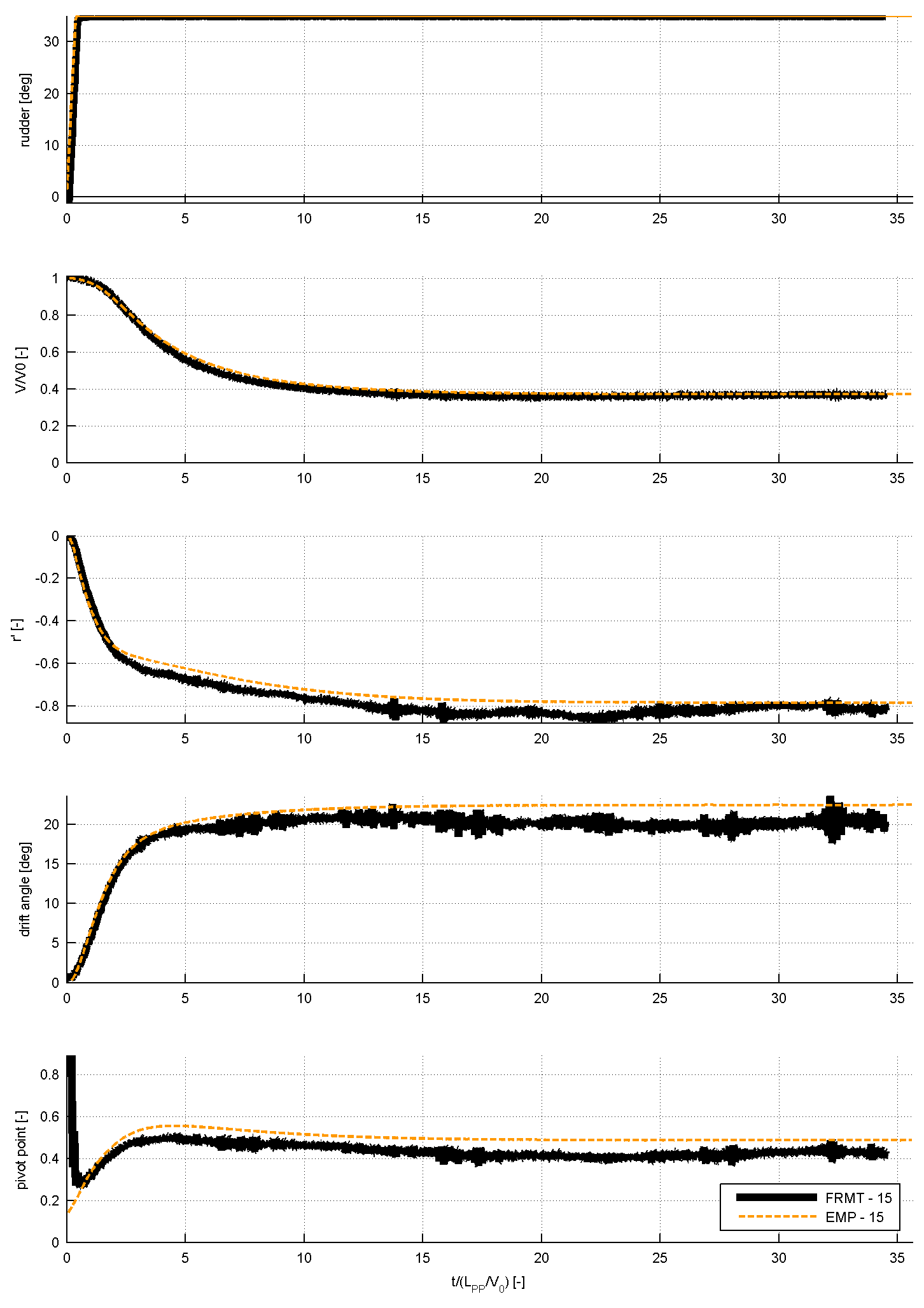
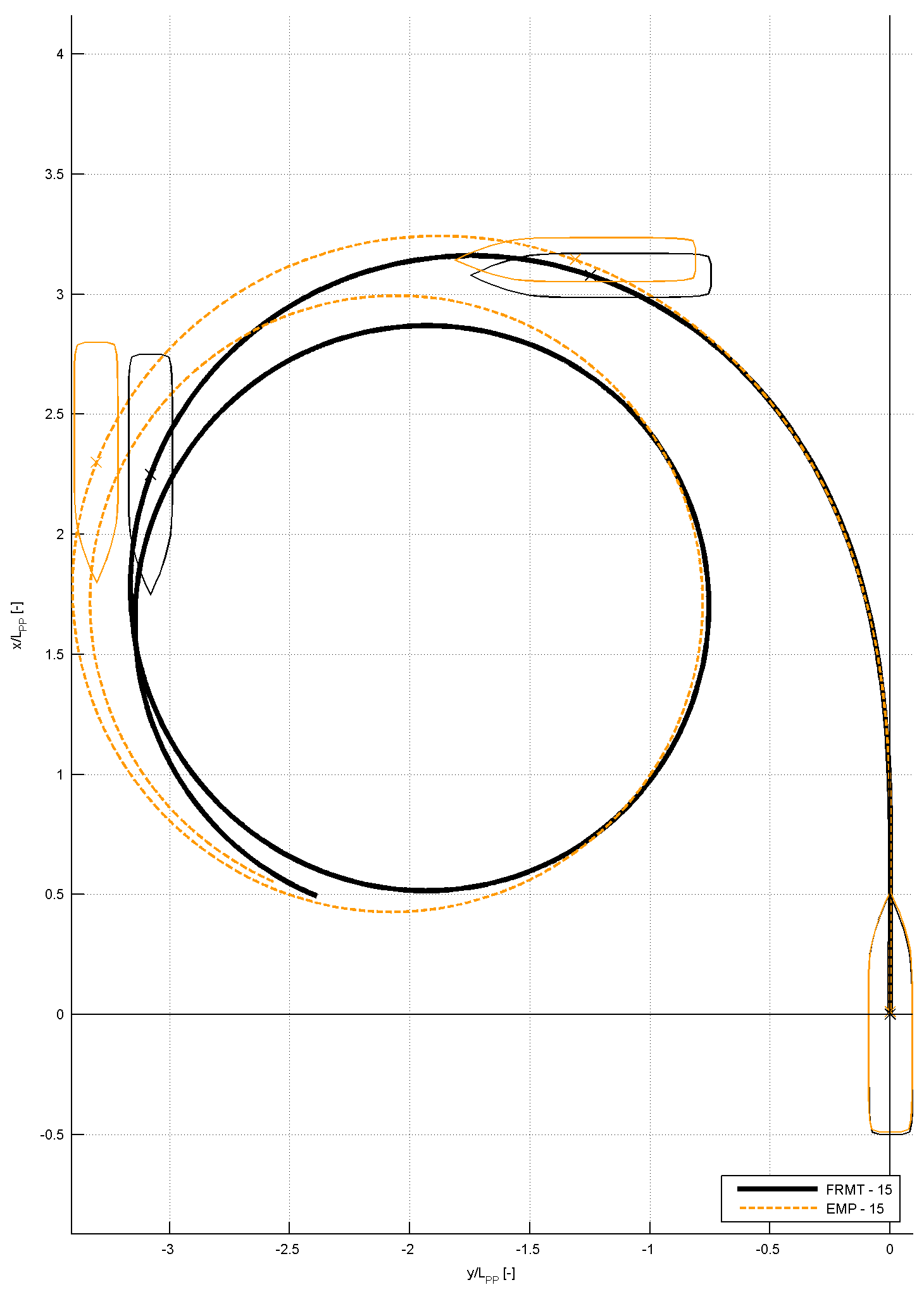 Figure 3: Comparison of time traces from the prediction method and the experiment
Figure 3: Comparison of time traces from the prediction method and the experiment
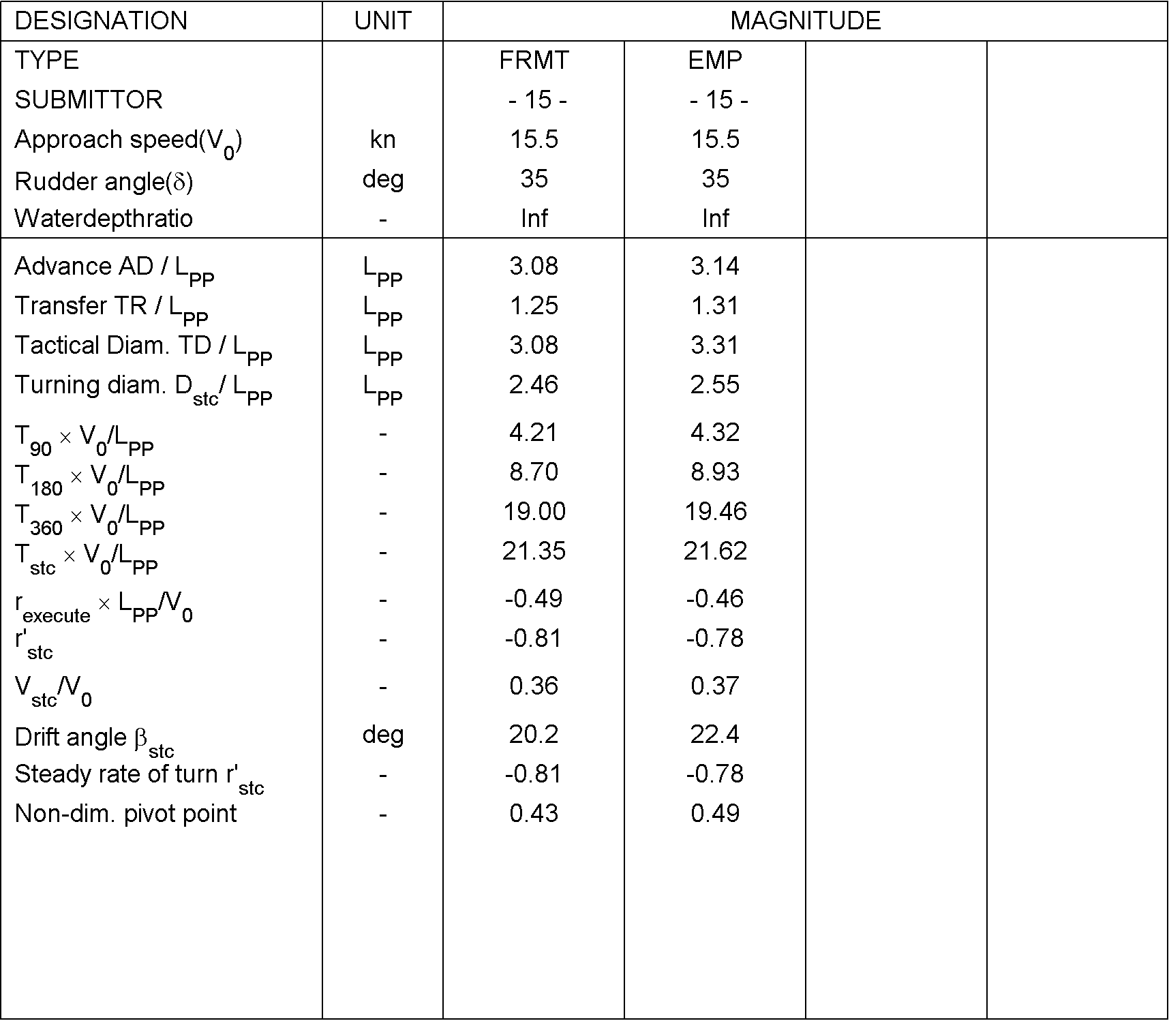
Table 5: Characteristics derived from the time series of the 35° turning circle manoeuvre to portside